【論文紹介】Novel View Synthesis with Diffusion Models
1K Views
October 25, 23
スライド概要
Web Developer / Research on generative models and continual learning
関連スライド
各ページのテキスト
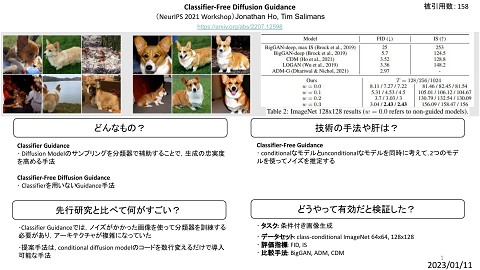
被引用数: 7 Novel view synthesis with diffusion model (ICLR 2023 openreview)Daniel Watson, William Chan, Ricardo Martin-Brualla https://arxiv.org/abs/2210.04628 どんなもの? 3DiM: 3D Diffuison Model ・Novel View SynthesisのためのDiffusion Model ・single-shotでありながら,繊細にオブジェクトを表現可能 ・オブジェクトの忠実度は犠牲にしている 3D consistency of a generated object ・3次元的な一貫性に関する新たな評価指標を提案 先行研究と比べて何がすごい? ・embeddingによるfew-shotな手法 -> オブジェクトがぼやける ・制限によるfew-shotな手法 -> 複数シーンへ汎化できない ・提案手法は複数シーンに汎化可能で,ぼやけずにオブジェクトを表現可能 な手法 技術の手法や肝は? Diffusion Model ・GANなどに比べると,アーキテクチャが単純で,パラメータの調整が容易 Stochastic conditioning ・diffusion stepで確率的に入力の条件づけを行うことで,3次元的な一貫性 を保ったままオブジェクトを表現 どうやって有効だと検証した? ・ タスク: novel view synthesis (signle-shot) ・ データセット: ShapeNet SRN ・ 評価指標: PSNR, SSIM, FID ・ 比較手法: SRN, PixelNeRF, VisionNeRF, CodeNeRF など 1 2022/11/09
どんなもの? Diffusion Model - 概要 Reverse Process Forward Process DDPM [J Ho, NeurIPS 2020] 2
どんなもの? Diffusion Model - ノイズの定式化 Forward Process (ノイズ付与) をこういうふうに考える 分散の強さ (再パラメータ化 ) Reverse Process (ノイズ除去) は が小さいときガウス分布にしたがう なんとかこいつらを計算すれば,ノイズから画像を復元できる DDPM [J Ho, NeurIPS 2020] 3
どんなもの? Diffusion Model - ノイズの定式化 Forward Process (ノイズ付与) をこういうふうに考える 分散の強さ (再パラメータ化 ) Reverse Process (ノイズ除去) は が小さいときガウス分布にしたがう → ネットワークで計算 なんとかこいつらを計算すれば,ノイズから画像を復元できる DDPM [J Ho, NeurIPS 2020] 4
どんなもの? Diffusion Model - 学習 あるタイムステップ の画像 から, を生成するようなノイズの 平均と分散を予測したい 学習には教師データが必要 数学的な背景があって,ノイズの強さ を使ってこれを表せる ネットワークの出力はこれ DDPM [J Ho, NeurIPS 2020] 5
どんなもの? 3DiM - 概要 入力 - 完全なノイズ画像 - オブジェクトの画像 - カメラポーズ (R, t) ノイズ画像から,オブジェクトの画像を参照しながら別の 視点 (R, t)から見た画像を生成する カメラポーズ 6
どんなもの? 問題点: 3次元の一貫性 作成 入力 別の視点から見た画像 7
技術の手法や肝は? 対策: Stochastic conditioning 別の視点の画像を生成するとき,生成した viewのすべてを使って 条件付けする (実際には生成した viewの中からdiffusion stepの数だけランダムに選択する ) 8
技術の手法や肝は? 学習 9
技術の手法や肝は? 条件付け 10
技術の手法や肝は? アーキテクチャ: X-UNet 11
どうやって有効だと検証した? 定性評価 12
どうやって有効だと検証した? 定量評価 13
どうやって有効だと検証した? 評価指標: 3D consistency scores 14