ネットワークで機能を持った物体を転送するシステムの開発の2024年1月時点の進捗状況報告
2.3K Views
March 12, 24
スライド概要
機能を持った「物」を, その内部構造も含めてコンピュータネットワークで移動(正確には複製を構築)するシステムの実現を試みており, その2024年1月時点の進捗状況報告を行う。対象となる「物」は, 規格化された知的部品を組み立ててできた「物」に限定する. この「物」を構成する部品は, お互いに通信が可能であり, また、お互いの相対的な位置や向きの関係も知ることができるようになっている. 知的部品がお互いに情報交換することにより, この「物」自体が自分で自分の構造の情報を知ることができるようになっている. この情報を外部に吸い上げ, コンピュータネットワークで遠隔地に転送し, その情報を使って元の「物」と同じ物を構築することにより, この移動が実現する. ステレオカメラやレーザースキャナなどを利用した入力装置は表面上の形や色の情報しか入力できないのに対して, ここで試みた方法は, 内部の構造の情報も入手できる. CTスキャナやMRIは、内部の構造の情報も入手できるが内部の機能の情報は一部しか入手できないのに対して, ここで試みた方法は, 内部の機能の情報も入手できる. また, CTスキャナやMRIは対象物より大きなものになってしまうが, ここで試みた方法は対象物そのものが、自分の情報を取り出す. なお, 送信元の「物」を解体(破壊)することにより, このコピーは実質的な「移動」になる.
関連スライド



各ページのテキスト
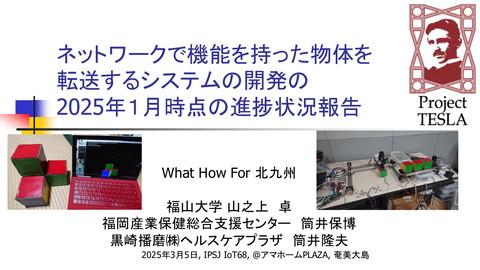
ネットワークで機能を持った物体を 転送するシステムの開発の 2024年1月時点の進捗状況報告 What How For 北九州 福山大学 山之上 卓 福岡産業保健総合支援センター 筒井保博 黒崎播磨㈱ヘルスケアプラザ 筒井隆夫 2024年3月12日, IPSJ IoT64, @宮古島
目次 ◼ ◼ ◼ ◼ ◼ ◼ ◼ 1. はじめに 2. システム概要 3. 開発履歴 4. 2023年度の進捗 5. 電磁石による把持・分離機構 6. 関連研究 7. おわりに
1.はじめに ◼ 目的 ◼ テレポーテーション(物体瞬間移動装置)を実現する Realな「物」を、その内部構造も含めてコンピュータネット ワークを使って遠隔地に移動(コピー) ◼ TESLA計画 ◼ ◼ 2024年1月時点の進捗報告
1.はじめに ◼ ◼ ◼ ◼ 転送の対象物は規格化された知的部品を組 み立てた「物」に限定 部品はお互いに通信可能 部品はお互いの相対的な位置や向きも知るこ とができる。 部品同士が情報交換->「物」自体が自分で自 分の構造を知ることができる。
1.はじめに ◼ 構造の取得手段 ◼ ステレオカメラやレーザスキャナ ◼ ◼ ◼ 表面上の形や色だけ TESLA: 内部の構造もOK CTスキャナやMRI ◼ ◼ 内部もOK。でも機能の情報は一部のみ。大きい。 TESLA: 機能もOK。情報取り出しのときは大きな装置は必要なし。
目次 ◼ ◼ ◼ ◼ ◼ ◼ ◼ 1. はじめに 2. システム概要 3. 開発履歴 4. 2023年度の進捗 5. 電磁石による把持・分離機構 6. 関連研究 7. おわりに
2.システム概要 材料の部品 送信元の構造物 通信経路 (ネットワーク) プローブ 受信装置(小型工場) 送信装置 (コンピュータ ) 受信された構造物 図1 Teleportation システム
2.システム概要 ◼ ◼ ◼ 相互に情報交換可能な, 規格化された部品(テスラダイス、 ダイス)で対象物体を作る。 対象物体は自分で自分がどのような構造なのか、どのよ うな機能を持っているか、を知ることができる。 これらの情報を遠隔地に送信し、同じ物体を組み立てれ ば良い。
2.システム概要 ◼ 送信元物体の情報獲得(構造認識など)に、 コンパイラの手法を利用 ◼ 構文解析 ◼ ◼ ◼ ◼ 部品は生成規則 結合面は非終端記号 木を生成するとき、生成規則の適用は1回のみ 属性文法 ◼ ◼ 合成属性として、情報を取り出す。 (相続属性として、各部品に情報を伝える。)
目次 ◼ ◼ ◼ ◼ ◼ ◼ ◼ 1. はじめに 2. システム概要 3. 開発履歴 4. 2023年度の進捗 5. 電磁石による把持・分離機構 6. 関連研究 7. おわりに
3.開発履歴 3.1 開発のきっかけ(1990年代後半) ◼ 1994年10月、JAIN コンソーシアム@志賀島 ◼ ◼ ◼ ◼ インターネットをこれからどう使うか? うどんの宅配の注文をオンラインで行おうという意見が出た. -> 山之上は, うどんをインターネットで配送しようと言ってしまった. 1995年、What How For 北九州(産学官交流サロン) ◼ ◼ テレポーテーションを実現できないか?と提案、やってみることに。 そのサロンの関係者である2人の筒井も一緒に活動。
3.開発履歴 3.2 特許申請(1999年) ◼ プロジェクト名:テスラ計画( by What How For 北九州の主 査(座長)、ニコラ・テスラがテレポーテーションを研究していた, という噂 ) ◼ ◼ ◼ 映画「フィラデルフィア・エクスペアリメント」 映画「プレステージ」 いろいろな方法を模索し, 相補的な結合システムによる部品 間の接続と, 相補的な配置を使った部品間通信方式を発明, 特許出願(2009年査定)
3.開発履歴 3.3 ◼ ◼ テスラダイスの試作開始とシミュレータ作成(2002年) youtube tesla teleportation system で検索! CPU… PIC -> H8
3.開発履歴 3.4 受信装置試作開始その1(2006年) ◼ CPU: R8C + MAXII(CPLD)
3.開発履歴 3.5 特許成立(2009年) ◼ ◼ CPU: 78K0-> LPC1114FN28/102 2010年10月:テスラダイスの接続面の認識, 接続の向き の認識, テスラダイス間の通信を行うソフトウェアを実現
3.開発履歴 3.6 Real->Virtual 転送成功(2021年) ◼ ◼ ◼ CPU: mbed LPC11U28 -> mbed LPC1768 ダイス間通信:可視光->赤外線 M5Stack Atom(->M5Stamp) でPC<->ダイス間通信
3.開発履歴 3.6 Real->Virtual 転送成功(2021年) 材料の部品 現在ここまで 送信元の構造物 通信経路 (ネットワーク) プローブ 受信装置(小型工場) 送信装置 (コンピュータ ) Virtual 空間 受信された構造物 図1 Teleportation システム
目次 ◼ ◼ ◼ ◼ ◼ ◼ ◼ 1. はじめに 2. システム概要 3. 開発履歴 4. 2023年度の進捗 5. 電磁石による把持・分離機構 6. 関連研究 7. おわりに
4.2023年度の進捗 ◼ FischerTechnik -> スライドテーブル+アームロボット+… ◼ 注意:まだ動いていません。
4.2023年度の進捗 4.1 テスラダイスの移動と回転
4.2023年度の進捗 4.1 テスラダイスの移動と回転 ◼ ◼ ◼ 受信装置が情報受け取り。物の 再生(組み立て)開始 アームロボットがベルトコンベア からダイスを1ツ取り出す。ダイ スの把握に電磁石を使用 アームロボットが部品回転用の 電磁石がある床に移動、ベルト コンベアは次のダイスを準備
4.2023年度の進捗 4.1 テスラダイスの移動と回転 ◼ アームロボットの電磁石と床の電 磁石とアームロボットとスライドテ ーブルを操作してダイスを回転
4.2023年度の進捗 4.1 テスラダイスの移動と回転 ◼ ◼ ◼ 方向が定まったダイスを、それが あるべき場所に移動。最初の1個 は床の電磁石で固定 アームロボットが移動し、次のダイ スを取り出す。 以上を繰り返す。
目次 ◼ ◼ ◼ ◼ ◼ ◼ ◼ 1. はじめに 2. システム概要 3. 開発履歴 4. 2023年度の進捗 5. 電磁石による把持・分離機構 6. 関連研究 7. おわりに
5.電磁石による把持・分離機構 ◼ ◼ ◼ テスラダイスの把持・分離機構必要 機械的な機構の作成は困難(慣れ ていない・経験がない) 電磁石を利用… (のつもりなんだけど)
5.電磁石による把持・分離機構 ◼ 電磁石のDrive:秋月のAE-TB67H450 ◼ ◼ ◼ AE-TB67H450 駆動にM5Stack Basic ◼ ◼ 順方向に電流を流してテスラダイスを吸着 逆方向に電流を流して, テスラダイスを分離できる …..はずであった Raspberry Pi から送られてくるコマンドに従って動作 それぞれの把握・分離機構は4つの電磁磁石を並 列接続 ◼ ◼ ◼ 抵抗は6Ω強あった. 電圧12V, AE-TB67H450に流れる電流は, I=E/R=12V/6Ω=2A … かなり熱くなる。 TB67H450は、出力耐圧 50 V、最大電流(3.5A)でOK.
5.電磁石による把持・分離機構 5.2 ネオジム磁石の脅威 ◼ ◼ ◼ ◼ 電磁石は鉄心を持つ 鉄心は磁石に吸着する 電流を流していなくても吸着する(鉄心をなくすと磁力が足 りない) 電流の向きを変えても吸着する ◼ ネオジム磁石で磁化された鉄心の磁力は、コイルに逆向きの電 流を流してできた磁力より大きかった。
5.電磁石による把持・分離機構 5.3 磁界計の製作 ◼ 当初、磁界を計測するため、方位磁 石を利用 ◼ ◼ ネオジム磁石?に磁化されたためか、 S/Nが逆転 サンハヤトの9軸慣性センサモジュー ル MM-9DS1とMrStackを使って磁界 計(x,y,zの向きと強さ)を作成
5.電磁石による把持・分離機構 5.4 電磁石の動作状況の可視化 ◼ ◼ ◼ 磁界は直接見えない 電流を流しているとき、その向きと有 無を知りたい。 2つの異なる色のLED(+抵抗)を電 磁石に並列接続して、電流の有無を 検出
目次 ◼ ◼ ◼ ◼ ◼ ◼ ◼ 1. はじめに 2. システム概要 3. 開発履歴 4. 2023年度の進捗 5. 電磁石による把持・分離機構 6. 関連研究 7. おわりに
6.関連研究 ◼ 6.1 Active Cube … 大阪大学。システムワットロボキューブを利用 ◼ ◼ 6.2 iCray… 大阪大学。粘土に大量の小型共振アンテナを埋め込み ◼ ◼ ◼ ◼ 形も内部構造もある程度わかるけど、アクチュエータ埋め込みは難しそう 6.3 CEBOT … 名古屋大学(福田先生..元IEEE会長)小さなロボットを組み立 てて大きなロボットを作る 6.4 Triangles and Narratives…MIT(石井先生のグループ) ◼ ◼ キューブ間の接続の向きを制限… 向きの認識機構なし。 立体的な構造には制限あり。多数の部品を結合したものを作るには不向き 6.5 相補的な構造… 東京大学(->大阪大学、中野先生) Self Reproduction をさせて、Bootstrapping できるかも。コンパイラはやって いる。Von Neumann さんの論文引用しないと怒られるかな?
目次 ◼ ◼ ◼ ◼ ◼ ◼ ◼ 1. はじめに 2. システム概要 3. 開発履歴 4. 2023年度の進捗 5. 電磁石による把持・分離機構 6. 関連研究 7. おわりに
7.おわりに ◼ 現時点でできていること ◼ ◼ 構造の自己認識… Real -> Virtual 成功 ロボットアームを動かしてテスラダイスの把持… ただし、離脱が ◼ ◼ ◼ ◼ 電磁石に電流なし。 ベルトコンベアの自動制御… ダイスがなくなったら動く スライドテーブルの制御 (つい先日)tofを使ったスライドテーブルの自動初期化
7.おわりに ◼ これから … まだまだ先は長い ◼ ◼ ◼ ◼ ◼ ◼ ◼ ロボットアームの様々な動作の作成 テスラダイスの回転 Virtual 世界に転送した情報から自動工場を操作する手順の作成 総合動作 スピードアップ マジックショーへの応用 … おもちゃ屋さんからご提案をいただきました。 安全性確保(物理的、論理的)
7.おわりに ◼ これから… 夢は広がる ◼ ◼ ◼ ◼ ◼ ダイスの改良… 物理的結合を強くする方法、アクチュエータ、セ ンサの組み込み、電源供給方法など。 … これはIoTだな。 Self Reproduction 遠隔で行うRealなモノづくりコンテスト。… 電子おもちゃ箱 (光に近い速度での) 宇宙ステーション、月、火星への物品の輸送
謝辞 ◼ What How For Kitakyushu ◼ (主査は元産業医科大学学長の東先生)
ちょっと宣伝 ◼ 4/27-4/28, Maker Faire Kyoto 2024 @けいはんなオープンイノベーションセンター ◼ ◼ 福山大学Makers, テレポートドレッサーなど出展 2024年度、前期・後期に、CGの世界的権威の西田友是 先生の講義。聴講制度で聴講可能。 ◼ 申込期限は前期3/31、後期8/31
動作例…デモ ◼ ◼ バグがあります。大目に見てください。 デモがうまく行かないときはここを見ます。 ◼ ◼ Youtube A real -> virtual converting system 20201017 https://www.youtube.com/watch?v=QyA7yQu1TV4
◼ ◼ ◼ サイコロ同士が発光ダイオードとフォトトランジスタを使っ て、通信し、お互いのサイコロがどの面でどの向きでつな がっているか?の情報を認識する。 その情報を外部のコンピュータに送信 その送信装置は小さくなくてはならない。低消費電力の方 が良い。簡単に作れるものの方が良い。 → M5Stamp Pico ◼ (BLEは苦手なのでWiFi- TCP/IPで外部と接続)
サイコロ 電気信号 電気信号 電気信号 電気信号 TCP/IP/WiFi 赤外線 サイコロ 電気信号 サイコロ 赤外線 電気信号 電気信号 電気信号 電気信号 電気信号 電気信号 電気信号
Mbed LPC1768 サイコロの中の1つだけ M5Stamp Pico UART TX UART RX WiFi Server, PC接続用
サイコロの中身 赤外線LED ネオジム磁石N ネオジム磁石S 赤外線LED フォトTr ネオジム磁石N 赤外線LED ネオジム磁石S 赤外線LED
サイコロの中身 mbed LPC1768
サイコロの中身 M5Stamp Pico (1つのサイコロだけ)
その他
◼
もうちょっと詳しい情報:
◼
"Real から Virtual への移動システムの実現の試み",
◼
◼
Real->Virtual 変換システムの開発その1の1
◼
◼
2021年10月21日のIoT縛りの勉強会! IoTLT vol.80 @Youtube
テレポーテーションとコンパイラ
◼
◼
◼
情報処理学会インタラクション2022論文集3D-20, 2022年3月1日
2004年8月夏のプログラミングシンポジウム@函館
https://www.slideshare.net/takashiyamanoue/ss-16159139
セル及びその結合状態認識方法
◼
特許:特開2001-188029(P2001-188029A)
謝辞 ◼ What How For Kitakyushu